이번에는 라이다센서를 우분투 환경에서 테스트동작 시켜보겠습니다.
먼저 라이다는 YDLIDAR X2를 사용하였으며 디바이스마트에서 구매하였습니다.
(아무대서나 구매하셔도 상과없어요:)) 우선 링크는 남겨놓을게요~~
전 할인할때 사서 거의 반값에 샀습니다!!
디바이스마트 링크 : (https://www.devicemart.co.kr/goods/view?no=12170774)
라이다센서 X2 문서 링크 : (https://www.ydlidar.com/service_support/download.html?gid=6)
1. 라이다센서를 컴퓨터에 연결해주시고 버츄얼박스에 usb연결을 추가해주세요.
(보시면 어댑터 보드에 Power과 Data USB포트가 있습니다!! 둘다 연결하셔서 Data선은 컴퓨터에 연결해주시고
Power선은 선택입니다!! 5V 전압의 전력 공급만 해주시면 됩니다.(전 그냥 pc에 연결했어요.:))
(사실 Power전원 공급 없이도 동작합니다!!)




USB 연결 장치 추가해주세요.
요렇게 추가만 해주시면 됩니다!! (맨밑에 USB아이콘 우클릭 후에 설정 들어가셔서 추가해주세요)


2. 자 이제 YDLIDAR에서 제공하는 패키지를 다운받고 작업공간 설정 및 package 복제를 합니다.
| mkdir -p ~/ydlidar_ros_ws/src |
| cd ~/ydlidar_ros_ws/src |
| git clone https://github.com/YDLIDAR/ydlidar_ros |

4. ydlidar_ros package를 뷜드하세요.
| cd .. |
| catkin_make |

4.1 편리성을 위해서 다음의 환경작업을 해주세요~
| echo "source ~/ydlidar_ros_ws/devel/setup.bash" >> ~/.bashrc |
| source ~/.bashrc |

5. LiDAR의 장치별로 parameters설정입니다. 보시면 해당 설정값에 대응되는 것들을 아래 링크에서 확인해보실 수 있습니다.
파라미터 설정 관련 자세한 링크 : (https://github.com/YDLIDAR/ydlidar_ros/blob/master/docs/paramters.md)
| cat ~/ydlidar_ros_ws/src/ydlidar_ros/launch/lidar.launch |

6. 시리얼 포트 허용 설정 및 동작 테스트
| sudo apt install rosbash |

| chmod 0777 src/ydlidar_ros/startup/* |
| sudo sh src/ydlidar_ros/startup/initenv.sh |


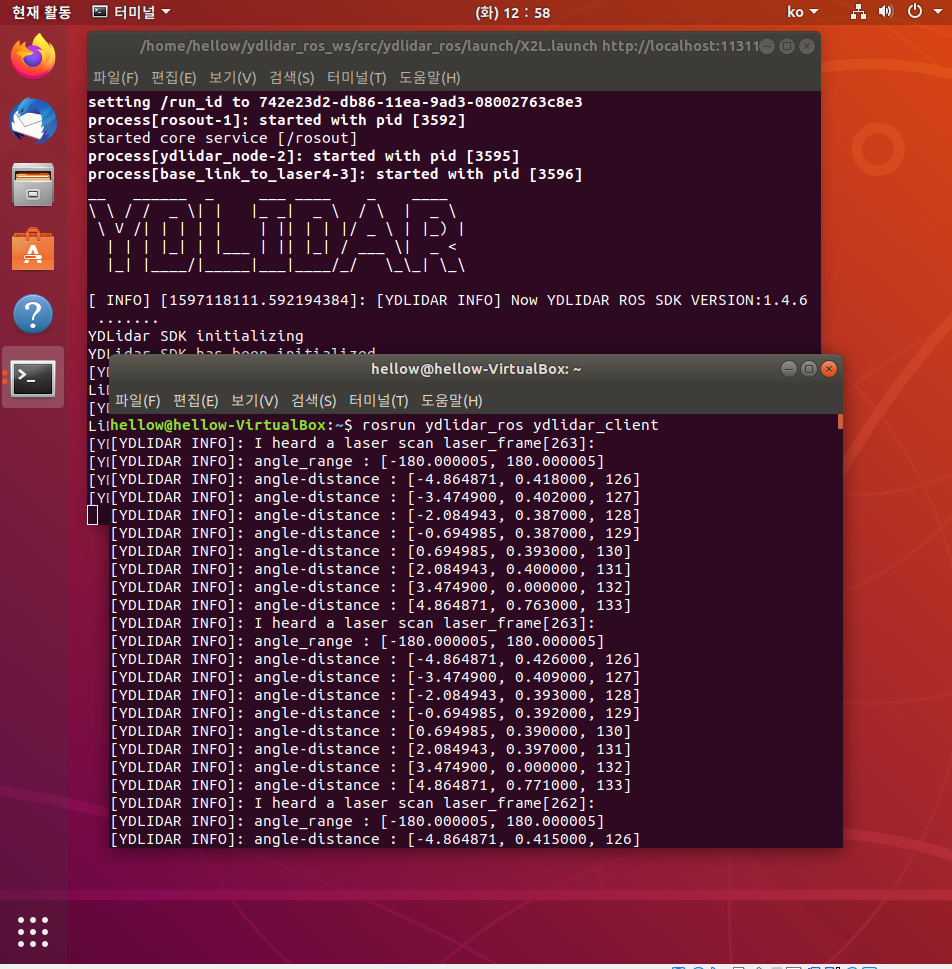
| roslaunch ydlidar_ros X2L.launch (모델별로 X4 G2 G4 다릅니다. 확인하시고 동작시키세요~) |
| rosrun |


자 그다음에 새로운 터미널창 여세요!!! 그리고 rosrun ydlidar_ros ydlidar_client를 입력하시면
현재 동작중인 라이다센서의 측정값들을 확인해 볼 수 있습니다.
자료 : (https://github.com/YDLIDAR/ydlidar_ros/blob/master/docs/ydlidar.md)
이상 마치겠습니다. 수고하셨습니다~~
+추가 2020-08-31
.bashrc에 지정해놓은 source ~/ydlidar_ros_ws/devel/setup.bash가 안먹네요 ㅠ.ㅠ
터미널 여실때마다 source ~/ydlidar_ros_ws/devel/setup.bash 입력 꼭 해주셔야 합니다!!
'ROS파고들기' 카테고리의 다른 글
| #6. GAZEBO 동작시키기(PX4), QGC다운로드 (0) | 2020.08.13 |
|---|---|
| #4. GAZEBO SITL 설치하기 (0) | 2020.08.11 |
| #3. ROS-Cartographer 설치하기 (2) | 2020.08.10 |
| #2. Virtual Box에 ROS + Packages설치 (0) | 2020.08.10 |
| #1. Window10에 Virtual Box 설치하기(ROS + LiDAR(SLAM + 자율주행)) (0) | 2020.08.08 |



