안녕하세요!! 오늘은 시뮬레이션을 동작시켜 보겠습니다.
1. 먼저 bash shell을 다운로드 합니다. (참고로 1.10.0 파일은 없어서 1.9.0버전의 파일을 다운로드 했습니다.)
| wget https://raw.githubusercontent.com/PX4/Devguide/v1.9.0/build_scripts/ubuntu_sim_ros_melodic.sh |
| source ubuntu_sim_ros_melodic.sh |
(참고: dev.px4.io/v1.10/en/setup/dev_env_linux_ubuntu.html#rosgazebo )

지금 디렉터리가 없다고 뜨네요 ㅎㅎ..
2. PX4 소스코드를 설치 및 빌드합니다.(1번에서 오류가 떳으므로 2번에서 뷜드를 해줍시다.)
| mkdir src |
| cd src |
| git clone https://github.com/PX4/Firmware.git |
| cd Firmware |
| make px4_sitl jmavsim |



중간에 오류가 났습니다. 모듈 jinja2가 없다고 해서 이거 추가해주고 다시 빌드할게요~
| sudo -H pip install ninja2 |

또 오류가 나서 이번엔 서브모듈 자체 업데이트를 하겠습니다.
| git submodule update --init --recursive |
그리고 나서 잘 동작합니다.
| make px4_sitl jmavsim |

(참고 : dev.px4.io/v1.9.0/en/setup/building_px4.html )
3. QgroundControl를 설치합니다.
| sud |
| sudo apt-get remove modemmanager -y |
| sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y |


밑에 적어놓은 주소를 우분투 firefox브라우저를 키셔서 주소창에 검색하시고 appimage를 다운로드 해주세요.



| chmod +x ./QGroundControl.AppImage |
| 다운로드 파일 QGroundControl.AppImage 더블클릭 |


(참고 : https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html )
4. 터미널 창을 열고 gazebo 시뮬레이션을 뷜드하세요.
(+추가 : 꼭 sudo make px4_sitl gazebo 하기 전에 bash ./Tools/setup/ubuntu.sh하고 재부팅 하세요!! 그러면 저같이 고생 안합니다 ㅠㅠ 뻘짓 ㅠㅠ)

또 error가 나네요 ㅠㅠ

뷜드를 다시 해주세요!!

이번엔 또다른 오류가....

그런데 제가 pip3 install을 해서인지 자꾸 패키지 설치를 해달라고 하네요~.~


해달라는대로 해줍니다.

우선 기존에 make px4_stil jmavsim 뷜드에 성공했을 때 저렇게 시뮬레이션 화면이 뜨지 않았었는데 python2가 문제였네요 ㅎ....(jmavsim
(위에 오류나서 다시 하는 과정은 무시하셔도 됩니다 ㅋㅋㅋ )
자 이제 다시 gazebo 시뮬레이션 빌드를 해줍시다.
| cd ~/src/Firmware |
| bash ./Tools/setup/ubuntu.sh |
(참고 : https://dev.px4.io/master/en/setup/dev_env_linux_ubuntu.html#sim_nuttx)
재부팅 하세요!!
| cd ~/src/Firmware |
| sudo make px4_sitl gazebo |



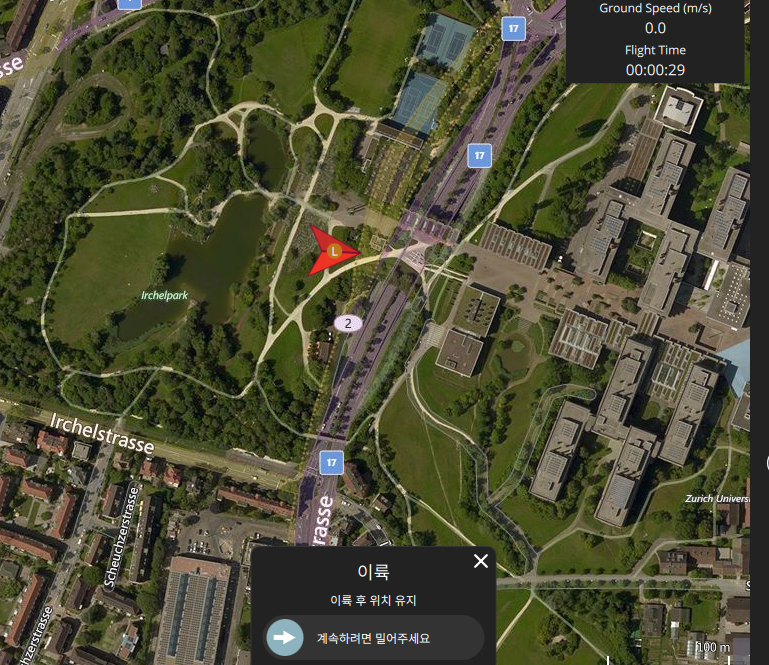
5. 비행시켜 봅시다!.


이상 마치겠습니다.~.~
'ROS파고들기' 카테고리의 다른 글
| #5. LiDAR Test(YDLIDAR X2) (5) | 2020.08.11 |
|---|---|
| #4. GAZEBO SITL 설치하기 (0) | 2020.08.11 |
| #3. ROS-Cartographer 설치하기 (2) | 2020.08.10 |
| #2. Virtual Box에 ROS + Packages설치 (0) | 2020.08.10 |
| #1. Window10에 Virtual Box 설치하기(ROS + LiDAR(SLAM + 자율주행)) (0) | 2020.08.08 |



